Coordenadas polares
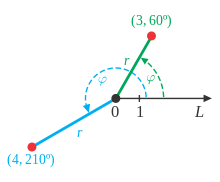
Pontos no sistema de coordenadas polares com o polo O e o eixo L. Em verde, o ponto com coordenada radial 3 e coordenada angular 60 graus ou (3, 60º). Em azul, o ponto (4,210°).
Em matemática, as coordenadas polares são um sistema de coordenadas bidimensional em que cada ponto no plano é determinado por uma distância e um ângulo em relação a um ponto fixo de referência.
O ponto de referência (análogo a origem no sistema cartesiano) é chamado de polo, e a semirreta do polo na direção de referência é o eixo polar. A distância a partir do polo é chamada coordenada radial ou raio, e o ângulo é chamado coordenada angular, ângulo polar ou azimute.[1]
Índice
1 História
2 Convenções
2.1 Unicidade das coordenadas polares
3 Conversão entre coordenadas polares e cartesianas
4 Equação polar de uma curva
4.1 Círculo
4.2 Rosa polar
4.3 Linha
4.4 Espiral de Arquimedes
4.5 Seções cônicas
5 Interseção de duas curvas polares
6 Números complexos
7 Cálculo
7.1 Cálculo diferencial
7.2 Cálculo integral (comprimento de arco)
7.3 Cálculo integral (área)
7.3.1 Generalização
7.4 Cálculo vetorial
7.4.1 Termos centrífugo e de Coriolis
7.4.1.1 Referenciais em rotação
8 Conexão com coordenadas esféricas e cilíndricas
9 Aplicações
9.1 Posição e navegação
9.2 Modelagem
10 Veja também
11 Referências
12 Bibliografia
História |

Hiparco (190 – 120 a.C.)
Os conceitos de ângulo e raio já eram usados pelas pessoas do primeiro milênio a.C.. O astrólogo e astrônomo grego Hiparco (190 – 120 a.C.) criou uma tabela de funções de corda dando o tamanho da corda para cada ângulo, e existem referências para eles usando coordenadas polares no estabelecimento de posições estelares.[2] Em Sobre as Espirais, Arquimedes descreve a Espiral de Arquimedes, uma função cujo raio depende do ângulo. A matemática grega, no entanto, não se estendeu a um sistema de coordenadas completo.
A partir do século VIII d.C., os astrônomos desenvolveram métodos para aproximar e calcular a direção para Meca (quibla) - e sua distância - de qualquer lugar na Terra.[3]
A partir do século IX d.C passaram a utilizar métodos de trigonometria esférica e projeções cartográficas para determinar estas quantidades com maior precisão. O cálculo é essencialmente a conversão das coordenadas polares equatoriais de Mecca (i.e. sua latitude e longitude) para suas coordenadas polares (i.e. sua quibla e distância) relativa a um sistema cujo meridiano de referência é o círculo máximo através da localização dada e os polos da Terra e cujo eixo polar é a linha entre a localização e o ponto antipodal.[4] Os cálculos eram tão acurados quanto possível sob as condições limitadas impostas pela suposição de que a Terra era uma esfera perfeita.</ref>
Existem diversas referências à introdução das coordenadas polares como parte de um sistema de coordenadas formal. A história completa é descrita em Origin of Polar Coordinates (em tradução livre, Origem das Coordenadas Polares), do professor Julian Lowell Coolidge, da Universidade Harvard.[5]Grégoire de Saint-Vincent e Bonaventura Cavalieri introduziram independentemente os conceitos em meados do século XVII. Saint-Vincent escreveu sobre eles em 1625 e publicou seu trabalho em 1647, enquanto Cavalieri publicou o seu trabalho em 1635 com uma versão corrigida sendo lançada em 1653. Cavalieri primeiramente usou coordenadas polares para resolver um problema relacionado a área dentro da espiral de Arquimedes. Blaise Pascal subsequentemente usou coordenadas polares para calcular o comprimento de arcos parabólicos.
Em Método das Fluxões (escrito em 1671, mas publicado em 1736), Sir Isaac Newton examinou as transformações entre as coordenadas polares, as quais chamou de "Sétima Maneira para Espirais", e outros nove sistemas de coordenadas.[6] No jornal Acta Eruditorum (1691), Jacob Bernoulli usou um sistema com um ponto e uma reta, chamado de polo e eixo polar, respectivamente. As coordenadas eram especificadas pela distância do polo e o ângulo a partir do eixo polar. O trabalho de Bernoulli estendeu-se a achar o raio de curvatura de curvas expressas nessas coordenadas.
O termo coordenadas polares atual tem sido atribuído a Gregorio Fontana e foi usado pelos escritores italianos do século XVIII. O termo apareceu em inglês na tradução de 1816 de George Peacock do livro Cálculo Diferencial e Integral de Lacroix.[7][8]Alexis Clairaut foi o primeiro a pensar em coordenadas polares em três dimensões, e Leonhard Euler foi o primeiro a realmente desenvolvê-las.[5]
Convenções |

A polar grid with several angles labeled in degrees
A coordenada radial é frequentemente denotada por r{displaystyle r}




Ângulos em notação polar são geralmente expressos tanto em graus quanto em radianos (2π rad{displaystyle 2pi rad}

Em muitos contextos, uma coordenada positiva angular significa que o ângulo ϕ{displaystyle phi }
Na literatura matemática, o eixo polar é frequentemente desenhado horizontalmente e apontando para a direita.
Unicidade das coordenadas polares |
Adicionando qualquer número de voltas completas (360∘{displaystyle 360^{circ }}




Onde uma representação única é necessária para algum ponto, é usual limitar r{displaystyle r}

![{displaystyle (-180^{circ },180^{circ }]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52564e11cb8ecd24997d7929ef3ff9a87052b335)

![{displaystyle (-pi ,pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7fbb1843079a9df3d3bbcce3249bb2599790de9c)

Conversão entre coordenadas polares e cartesianas |

Um diagrama ilustrando a relação entre as coordenadas polares e cartesianas

Uma curva no plano cartesiano pode ser mapeada em coordenadas polares. Nesta animação, y=sin(6x)+2{displaystyle y=sin(6x)+2}
 é mapeada em r=sin(6φ)+2{displaystyle r=sin(6varphi )+2}
é mapeada em r=sin(6φ)+2{displaystyle r=sin(6varphi )+2} .
.
As coordenadas polares r{displaystyle r}

x=rcos(ϕ){displaystyle x=rcos(phi )}
y=rsin(ϕ){displaystyle y=rsin(phi )}
As coordenadas cartesianas x{displaystyle x}
![{displaystyle phi in (-pi ,pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/37a9db276fa2848727409fad003905e9d87e6328)
r=x2+y2{displaystyle r={sqrt {x^{2}+y^{2}}}}
(como no Teorema de Pitágoras ou na norma euclidiana), e
φ=atan2(y,x){displaystyle varphi =operatorname {atan2} (y,x)}

onde atan2(x,y){displaystyle operatorname {atan2} (x,y)}
atan2(y,x)={arctan(yx)se x>0arctan(yx)+πse x<0e y≥0arctan(yx)−πse x<0e y<0π2se x=0 e y>0−π2se x=0 e y<0indefinidose x=0 e y=0{displaystyle operatorname {atan2} (y,x)={begin{cases}arctan({frac {y}{x}})&{mbox{se }}x>0\arctan({frac {y}{x}})+pi &{mbox{se }}x<0&{mbox{e }}ygeq 0\arctan({frac {y}{x}})-pi &{mbox{se }}x<0&{mbox{e }}y<0\{frac {pi }{2}}&{mbox{se }}x=0&{mbox{ e }}y>0\-{frac {pi }{2}}&{mbox{se }}x=0&{mbox{ e }}y<0\{text{indefinido}}&{mbox{se }}x=0&{mbox{ e }}y=0end{cases}}}

O valor acima de ϕ{displaystyle phi }

Equação polar de uma curva |
A equação uma curva algébrica expressa em coordenadas polares é conhecida como uma equação polar. Em muitos casos, tal equação pode simplesmente ser especificada ao definir r{displaystyle r}
Diferentes formas de simetria podem ser deduzidas da equação da função polar r{displaystyle r}



Por conta da natureza circular do sistema de coordenadas polares, muitas curvas podem ser descritas por uma equação polar simples, enquanto que suas formas cartesianas são muito mais intrincadas. Dentre as mais conhecidas dessas curvas estão a rosa polar, a espiral de Arquimedes, a lemniscata, o limaçon e a cardioide.
Para o círculo, a linha e a rosa polar abaixo, é entendido que não existem restrições no domínio e intervalo da curva.
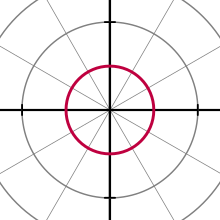
Um círculo de equaçãor(ϕ)=1{displaystyle r(phi )=1}

Círculo |
A equação geral para um círculo com centro em (r0,γ){displaystyle (r_{0},gamma )}

r2−2rr0cos(ϕ−γ)+r02=a2{displaystyle r^{2}-2rr_{0}cos(phi -gamma )+r_{0}^{2}=a^{2}}

Isto pode ser simplificado de diversas maneiras, para se adequar a casos mais específicos, tais como a equação
r(ϕ)=a{displaystyle r(phi )=a}

para um círculo com centro no polo e raio a{displaystyle a}
Quando r0=a{displaystyle r_{0}=a}
r=2acos(ϕ−γ){displaystyle r=2acos(phi -gamma )}
.
No caso geral, a equação pode ser resolvida pra r{displaystyle r}
r=r0cos(ϕ−γ)+a2−r02sin2(ϕ−γ){displaystyle r=r_{0}cos(phi -gamma )+{sqrt {a^{2}-r_{0}^{2}sin ^{2}(phi -gamma )}}}
,
a solução com um sinal de menos antes da raiz quadrada dá a mesma curva.

Uma rosa polar de equação r(ϕ)=2sin(4ϕ){displaystyle r(phi )=2operatorname {sin} (4phi )}

Rosa polar |
Uma rosa polar é uma famosa curva matemática que parece como uma flor petalada e que pode ser expressa com uma simples equação polar,
r(ϕ)=acos(kϕ+γ0){displaystyle r(phi )=acos(kphi +gamma _{0})}

para qualquer constante γ0{displaystyle gamma _{0}}



Linha |
Linhas radiais (aquelas passando pelo polo) são representadas pela equação
ϕ=γ{displaystyle phi =gamma }
,
onde γ{displaystyle gamma }


r(ϕ)=r0sec(ϕ−γ){displaystyle r(phi )={r_{0}}sec(phi -gamma )}
.
Caso contrário, (r0,γ){displaystyle (r_{0},gamma )}
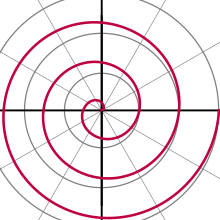
Espiral de Arquimedes de equação r(ϕ)=ϕ/2π{displaystyle r(phi )=phi /2pi }
 , para ϕ∈(0,6π){displaystyle phi in (0,6pi )}
, para ϕ∈(0,6π){displaystyle phi in (0,6pi )}

Elipse exibindo o semi-latus rectum
Espiral de Arquimedes |
A espiral de Arquimedes é uma famosa espiral que foi descoberta por Arquimedes, que pode também ser expressada com uma simples equação polar. É representada pela equação:
r(ϕ)=a+bϕ{displaystyle r(phi )=a+bphi }

Mudar o parâmetro a{displaystyle a}


Seções cônicas |
Uma seção cônica com um foco no polo e o outro em algum outro lugar na linha radial de 0º (de modo que o semieixo maior da cônica repouse no eixo polar) é dada por:
r=l1−ecos(ϕ){displaystyle r={frac {l}{1-ecos(phi )}}}

onde e{displaystyle e}





Interseção de duas curvas polares |
Os gráficos de duas funções polares r=f(θ){displaystyle r=f(theta )}

- Na origem das equações f(θ)=0{displaystyle f(theta )=0}
e g(θ)=0{displaystyle g(theta )=0}
há ao menos uma solução para cada.
- Todos os pontos (g(θi),θi){displaystyle (g(theta _{i}),theta _{i})}
onde θi{displaystyle theta _{i}}
é uma das soluções da equação f(θ)=g(θ){displaystyle f(theta )=g(theta )}
.
- Todos os pontos (g(θi),θi){displaystyle (g(theta _{i}),theta _{i})}
onde k{displaystyle k}
Números complexos |

Uma ilustração de um número complexo z{displaystyle z}
 plotada no plano complexo
plotada no plano complexo
Uma ilustração de um número complexo plotado no plano complexo usando a fórmula de Euler
Todo número complexo pode ser representado como um ponto no plano complexo e, portanto, pode ser expressado especificando as coordenadas cartesianas do ponto (chamado de forma retangular ou cartesiana) ou as coordenadas polares do ponto (denominada forma polar). O número complexo z{displaystyle z}
z=x+iy{displaystyle z=x+iy}

onde i{displaystyle i}
z=r⋅(cosφ+isinφ){displaystyle z=rcdot (cos varphi +isin varphi )}

e a partir daí como
z=reiφ{displaystyle z=re^{ivarphi }}

onde e{displaystyle e}
Para as operações de multiplicação, divisão e exponenciação de números complexos, é geralmente muito simples trabalhar com números complexos expressos na forma polar em vez da forma retangular. Para as regras de exponenciação:
- Multiplicação:
r0eiφ0⋅r1eiφ1=r0r1ei(φ0+φ1){displaystyle r_{0}e^{ivarphi _{0}}cdot r_{1}e^{ivarphi _{1}}=r_{0}r_{1}e^{i(varphi _{0}+varphi _{1})}}

- Divisão:
r0eiφ0r1eiφ1=r0r1ei(φ0−φ1){displaystyle {frac {r_{0}e^{ivarphi _{0}}}{r_{1}e^{ivarphi _{1}}}}={frac {r_{0}}{r_{1}}}e^{i(varphi _{0}-varphi _{1})}}

- Exponenciação (Fórmula de De Moivre):
(reiφ)n=rneinφ{displaystyle (re^{ivarphi })^{n}=r^{n}e^{invarphi }}

Cálculo |
Cálculo pode ser aplicado em equações expressas em coordenadas polares.[16][17]
A coordenada angular ϕ{displaystyle phi }
Cálculo diferencial |
Usando x=rcos(ϕ){displaystyle x=rcos(phi )}


{r∂u∂r=r∂u∂x∂x∂r+r∂u∂y∂y∂r∂u∂ϕ=∂u∂x∂x∂ϕ+∂u∂y∂y∂ϕ{displaystyle {begin{cases}r{frac {partial u}{partial r}}&=&r{frac {partial u}{partial x}}{frac {partial x}{partial r}}+r{frac {partial u}{partial y}}{frac {partial y}{partial r}}\{frac {partial u}{partial phi }}&=&{frac {partial u}{partial x}}{frac {partial x}{partial phi }}+{frac {partial u}{partial y}}{frac {partial y}{partial phi }}end{cases}}}
,
ou
{r∂u∂r=r∂u∂xcos(ϕ)+r∂u∂ysin(ϕ)=x∂u∂x+y∂u∂y∂u∂φ=−∂u∂xrsin(ϕ)+∂u∂yrcos(ϕ)=−y∂u∂x+x∂u∂y{displaystyle {begin{cases}r{frac {partial u}{partial r}}&=&r{frac {partial u}{partial x}}cos(phi )+r{frac {partial u}{partial y}}sin(phi )&=&x{frac {partial u}{partial x}}+y{frac {partial u}{partial y}}\{frac {partial u}{partial varphi }}&=&-{frac {partial u}{partial x}}rsin(phi )+{frac {partial u}{partial y}}rcos(phi )&=&-y{frac {partial u}{partial x}}+x{frac {partial u}{partial y}}end{cases}}}
,
Consequentemente, tem-se a seguinte fórmula:
{r∂∂r=x∂∂x+y∂∂y∂∂ϕ=−y∂∂x+x∂∂y{displaystyle {begin{cases}r{frac {partial }{partial r}}&=&x{frac {partial }{partial x}}+y{frac {partial }{partial y}}\{frac {partial }{partial phi }}&=&-y{frac {partial }{partial x}}+x{frac {partial }{partial y}}end{cases}}}

Usando a transformação inversa de coordenadas, uma relação análoga e recíproca pode ser obtida através das derivadas. Dada a função u(r,ϕ){displaystyle u(r,phi )}
{∂u∂x=∂u∂r∂r∂x+∂u∂ϕ∂ϕ∂x∂u∂y=∂u∂r∂r∂y+∂u∂ϕ∂ϕ∂y{displaystyle {begin{cases}{frac {partial u}{partial x}}&=&{frac {partial u}{partial r}}{frac {partial r}{partial x}}+{frac {partial u}{partial phi }}{frac {partial phi }{partial x}}\{frac {partial u}{partial y}}&=&{frac {partial u}{partial r}}{frac {partial r}{partial y}}+{frac {partial u}{partial phi }}{frac {partial phi }{partial y}}end{cases}}}

ou
{∂u∂x=∂u∂rxx2+y2−∂u∂ϕyx2+y2=cos(ϕ)∂u∂r−1rsin(ϕ)∂u∂ϕ∂u∂y=∂u∂ryx2+y2+∂u∂ϕxx2+y2=sin(ϕ)∂u∂r+1rcos(ϕ)∂u∂ϕ{displaystyle {begin{cases}{frac {partial u}{partial x}}&=&{frac {partial u}{partial r}}{frac {x}{sqrt {x^{2}+y^{2}}}}-{frac {partial u}{partial phi }}{frac {y}{x^{2}+y^{2}}}&=&cos(phi ){frac {partial u}{partial r}}-{frac {1}{r}}sin(phi ){frac {partial u}{partial phi }}\{frac {partial u}{partial y}}&=&{frac {partial u}{partial r}}{frac {y}{sqrt {x^{2}+y^{2}}}}+{frac {partial u}{partial phi }}{frac {x}{x^{2}+y^{2}}}&=&sin(phi ){frac {partial u}{partial r}}+{frac {1}{r}}cos(phi ){frac {partial u}{partial phi }}end{cases}}}

Consequentemente, tem-se a seguinte fórmula:
{∂∂x=cos(ϕ)∂∂r−1rsin(ϕ)∂∂ϕ∂∂y=sin(ϕ)∂∂r+1rcos(ϕ)∂∂ϕ{displaystyle {begin{cases}{frac {partial }{partial x}}&=&cos(phi ){frac {partial }{partial r}}-{frac {1}{r}}sin(phi ){frac {partial }{partial phi }}\{frac {partial }{partial y}}&=&sin(phi ){frac {partial }{partial r}}+{frac {1}{r}}cos(phi ){frac {partial }{partial phi }}end{cases}}}

Para encontrar a inclinação cartesiana da linha tangente a uma curva polar r(ϕ){displaystyle r(phi )}
{x=r(ϕ)cos(ϕ)y=r(ϕ)sin(ϕ){displaystyle {begin{cases}x&=&r(phi )cos(phi )\y&=&r(phi )sin(phi )end{cases}}}

Diferenciando ambas as equações em relação a ϕ{displaystyle phi }
{dxdϕ=r′(ϕ)cos(ϕ)−r(ϕ)sin(ϕ)dydϕ=r′(ϕ)sin(ϕ)+r(ϕ)cos(ϕ){displaystyle {begin{cases}{frac {dx}{dphi }}&=&r'(phi )cos(phi )-r(phi )sin(phi )\{frac {dy}{dphi }}&=&r'(phi )sin(phi )+r(phi )cos(phi )end{cases}}}

Dividindo a segunda equação pela primeira produz a inclinação cartesiana da linha tangente para a curva no ponto (r(ϕ),ϕ){displaystyle (r(phi ),phi )}
dydx=r′(ϕ)sin(ϕ)+r(ϕ)cos(ϕ)r′(ϕ)cos(ϕ)−r(ϕ)sin(ϕ){displaystyle {frac {dy}{dx}}={frac {r'(phi )sin(phi )+r(phi )cos(phi )}{r'(phi )cos(phi )-r(phi )sin(phi )}}}

Para outras fórmulas úteis que incluem divergência, gradiente e laplaciano em coordenadas polares, veja coordenadas curvilíneas.
Cálculo integral (comprimento de arco) |
O comprimento de arco (comprimento de um segmento de linha) definido por uma função polar é encontrado por integração sobre a curva r(ϕ){displaystyle r(phi )}





L=∫ab[r(ϕ)]2+[dr(ϕ)dϕ]2dϕ{displaystyle L=int _{a}^{b}{sqrt {left[r(phi )right]^{2}+left[{tfrac {dr(phi )}{dphi }}right]^{2}}}dphi }
![{displaystyle L=int _{a}^{b}{sqrt {left[r(phi )right]^{2}+left[{tfrac {dr(phi )}{dphi }}right]^{2}}}dphi }](https://wikimedia.org/api/rest_v1/media/math/render/svg/596d00a5b2e764eca7c56d034de7f5a90f2441fb)
Cálculo integral (área) |

A região de integração R{displaystyle R}
 é limitada pela curva r(ϕ){displaystyle r(phi )} e os raios ϕ=a{displaystyle phi =a} e ϕ=b{displaystyle phi =b}
é limitada pela curva r(ϕ){displaystyle r(phi )} e os raios ϕ=a{displaystyle phi =a} e ϕ=b{displaystyle phi =b}
Seja R{displaystyle R}
12∫ab(r(ϕ))2dϕ{displaystyle {frac {1}{2}}int _{a}^{b}left(r(phi )right)^{2},dphi }


A região R{displaystyle R}
é aproximada por n{displaystyle n} setores (n=5{displaystyle n=5} )
)
Um planímetro, que computa mecanicamente integrais polares
Este resultado pode ser achado como segue. Primeiro, o intervalo [a,b]{displaystyle [a,b]}![[a,b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935)






(r(ϕi))2π⋅Δϕ2π=12(r(ϕi))2Δϕ{displaystyle left(r(phi _{i})right)^{2}pi cdot {frac {Delta phi }{2pi }}={frac {1}{2}}left(r(phi _{i})right)^{2}Delta phi }

Consequentemente, a área total de todos os setores é
∑i=1n12r(ϕi)2Δϕ{displaystyle sum _{i=1}^{n}{frac {1}{2}}r(phi _{i})^{2},Delta phi }

Conforme o número de subintervalos aumenta, a aproximação da área continua a melhorar. No limite, isto é, com n⟶∞{displaystyle nlongrightarrow infty }
Um aparelho mecânico que computa a área é o planímetro (figura ao lado), que mede a área de figuras planas ao traçá-las: isto replica a integração em coordenadas polares adicionando uma articulação de modo que a ligação de dois elementos efetua o Teorema de Green, convertendo a integral polar quadrática para uma integral linear.
Generalização |
Usando coordenadas cartesianas, um elemento de área infinitesimal pode ser calculado como dA=dx×dy{displaystyle dA=dxtimes dy}
J=det∂(x,y)∂(r,ϕ)=|∂x∂r∂x∂ϕ∂y∂r∂y∂ϕ|=|cosϕ−rsin(ϕ)sinϕrcos(ϕ)|=rcos2(ϕ)+rsin2(ϕ)=r{displaystyle J=det {frac {partial (x,y)}{partial (r,phi )}}={begin{vmatrix}{frac {partial x}{partial r}}&{frac {partial x}{partial phi }}\[8pt]{frac {partial y}{partial r}}&{frac {partial y}{partial phi }}end{vmatrix}}={begin{vmatrix}cos phi &-rsin(phi )\sin phi &rcos(phi )end{vmatrix}}=rcos ^{2}(phi )+rsin ^{2}(phi )=r}
![{displaystyle J=det {frac {partial (x,y)}{partial (r,phi )}}={begin{vmatrix}{frac {partial x}{partial r}}&{frac {partial x}{partial phi }}\[8pt]{frac {partial y}{partial r}}&{frac {partial y}{partial phi }}end{vmatrix}}={begin{vmatrix}cos phi &-rsin(phi )\sin phi &rcos(phi )end{vmatrix}}=rcos ^{2}(phi )+rsin ^{2}(phi )=r}](https://wikimedia.org/api/rest_v1/media/math/render/svg/35f71f9a6a360d6c632169e91ab37751ef95f06c)
Consequentemente, um elemento de área em coordenadas polares pode ser escrito como
dA=dx×dy =J×dr×dϕ=r×dr×dϕ{displaystyle dA=dxtimes dy =Jtimes drtimes dphi =rtimes drtimes dphi }

Logo, uma função que é dada em coordenadas polares pode ser integrada como segue:
∬Rf(x,y)dA=∫ab∫0r(ϕ)f(r,ϕ)rdrdϕ{displaystyle iint _{R}f(x,y),dA=int _{a}^{b}int _{0}^{r(phi )}f(r,phi ),r,dr,dphi }

Aqui, R{displaystyle R}
A fórmula par a área de R mencionada acima é recuperada ao tomar f{displaystyle f}
∫−∞∞e−x2dx=π{displaystyle int _{-infty }^{infty }e^{-x^{2}},dx={sqrt {pi }}}

Cálculo vetorial |
Cálculo vetorial também pode ser aplicado a coordenadas polares. Para movimento planar, seja r{displaystyle r}
Definem-se os vetores unitários
r^=(cos(ϕ),sin(ϕ)){displaystyle {hat {r}}=(cos(phi ),sin(phi ))}

na direção de r{displaystyle r}
ϕ^=(−sin(ϕ),cos(ϕ))=k^×r^{displaystyle {hat {phi }}=(-sin(phi ),cos(phi ))={hat {k}}times {hat {r}}}

no plano de movimento perpendicular a direção radial, onde k^{displaystyle {hat {k}}}
Então
r=(x,y)=r(cos(ϕ),sin(ϕ))=r×r^{displaystyle r=(x,y)=r(cos(phi ),sin(phi ))=rtimes {hat {r}}}

r˙=(x˙,y˙)=r˙(cos(ϕ),sin(ϕ))+rϕ˙(−sin(ϕ),cos(ϕ))=r˙r^+rϕ˙ϕ^{displaystyle {dot {r}}=({dot {x}},{dot {y}})={dot {r}}(cos(phi ),sin(phi ))+r{dot {phi }}(-sin(phi ),cos(phi ))={dot {r}}{hat {r}}+r{dot {phi }}{hat {phi }}}

r¨=(x¨,y¨)=r¨(cos(ϕ),sin(ϕ))+2r˙ϕ˙(−sin(ϕ),cos(ϕ))+rϕ¨(−sin(ϕ),cos(ϕ))−rϕ2˙(cos(ϕ),sin(ϕ))=(r¨−rϕ2˙)r^+(rϕ¨+2r˙ϕ˙)ϕ^=(r¨−rϕ˙2)r^+1rddt(r2ϕ˙)ϕ^{displaystyle {begin{aligned}{ddot {r}}=({ddot {x}},{ddot {y}})&={ddot {r}}(cos(phi ),sin(phi ))+2{dot {r}}{dot {phi }}(-sin(phi ),cos(phi ))+r{ddot {phi }}(-sin(phi ),cos(phi ))-r{dot {phi ^{2}}}(cos(phi ),sin(phi ))\\&=left({ddot {r}}-r{dot {phi ^{2}}}right){hat {r}}+left(r{ddot {phi }}+2{dot {r}}{dot {phi }}right){hat {phi }}\&=({ddot {r}}-r{dot {phi }}^{2}){hat {r}}+{frac {1}{r}}{frac {d}{dt}}left(r^{2}{dot {phi }}right){hat {phi }}end{aligned}}}

Termos centrífugo e de Coriolis |
 sempre aponta radialmente a partir da origem.
sempre aponta radialmente a partir da origem.
 sempre tangente ao padrão de movimento.
sempre tangente ao padrão de movimento. , não paralelo ao movimento radial mas compensado pelas acelerações centrípeta e de Coriolis, nem tangente ao padrão, mas compensado pelas acelerações centrípeta e radial.
, não paralelo ao movimento radial mas compensado pelas acelerações centrípeta e de Coriolis, nem tangente ao padrão, mas compensado pelas acelerações centrípeta e radial. , mas a um plano de dimensão maior.
, mas a um plano de dimensão maior.O termo rϕ2˙{displaystyle r{dot {phi ^{2}}}}

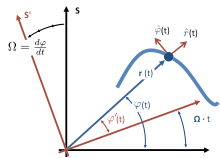
Referencial inercial S{displaystyle S}
 e o referencial instantâneo não-inercial co-rotativo S′{displaystyle S'}
e o referencial instantâneo não-inercial co-rotativo S′{displaystyle S'} . O referencial co-rotativo rotaciona a uma taxa angular Ω{displaystyle Omega }
. O referencial co-rotativo rotaciona a uma taxa angular Ω{displaystyle Omega } igual a taxa de rotação da partícula sobre a origem de S′{displaystyle S'} no momento t{displaystyle t}. A partícula está localizada no vetor de posição r(t){displaystyle r(t)}
igual a taxa de rotação da partícula sobre a origem de S′{displaystyle S'} no momento t{displaystyle t}. A partícula está localizada no vetor de posição r(t){displaystyle r(t)} e os vetores unitários são mostrados na direção radial da origem à partícula e também na direção de crescimento angular de ϕ{displaystyle phi }, normal a direção radial. Estes vetores unitários não precisam estar relacionados a tangente ou a normal do padrão de movimento. A distância radial r{displaystyle r} também não precisa estar relacionada ao raio de curvatura do padrão de movimento.
e os vetores unitários são mostrados na direção radial da origem à partícula e também na direção de crescimento angular de ϕ{displaystyle phi }, normal a direção radial. Estes vetores unitários não precisam estar relacionados a tangente ou a normal do padrão de movimento. A distância radial r{displaystyle r} também não precisa estar relacionada ao raio de curvatura do padrão de movimento.
Referenciais em rotação |
Para uma partícula em movimento planar, uma abordagem para atribuir significado físico a esses termos é baseada no conceito de um referencial instantâneo co-rotativo. Para definir um referencial co-rotativo, é selecionada uma origem, a partir da qual é definida a distância r(t){displaystyle r(t)}





- F+Fcf+FCor=mr¨ ,{displaystyle {boldsymbol {F}}+{boldsymbol {F_{cf}}}+{boldsymbol {F_{Cor}}}=m{ddot {boldsymbol {r}}} ,}

Onde os pontos sobre a variável r{displaystyle r}
- Fr+mrΩ2=mr¨{displaystyle F_{r}+mrOmega ^{2}=m{ddot {r}}}
Fφ−2mr˙Ω=mrφ¨{displaystyle F_{varphi }-2m{dot {r}}Omega =mr{ddot {varphi }}},

que pode ser comparados as equações para o referencial inercial:
- Fr=mr¨−mrφ˙2{displaystyle F_{r}=m{ddot {r}}-mr{dot {varphi }}^{2}}
Fφ=mrφ¨+2mr˙φ˙{displaystyle F_{varphi }=mr{ddot {varphi }}+2m{dot {r}}{dot {varphi }}}.

Esta comparação, mais o conhecimento de que por definição o referencial inercial no tempo t{displaystyle t}
Para o movimento geral de uma partícula (em oposição ao movimento circular simples), as forças centrífugas e Coriolis no referencial de uma partícula são comumente referidas ao círculo de osculação instantâneo desse movimento, não a um centro fixo de coordenadas polares. Para mais detalhes, veja força centrípeta.
Conexão com coordenadas esféricas e cilíndricas |
O sistema de coordenadas polares é estendido para três dimensões com dois sistemas distintos de coordenadas, o sistema cilíndrico e o sistema esférico.
Aplicações |
Coordenadas polares são bidimensionais e portanto devem ser usadas somente quando as posições do ponto repousam em um único plano bidimensional. Elas são mais apropriadas em qualquer contexto onde o fenômeno sendo considerado é inerentemente amarrado na direção e tamanho de um ponto central. Por exemplo, os exemplos acima mostram como equações polares elementares são suficientes para definir curvas - tais como a espiral de Arquimedes - cujas equações nas coordenadas cartesianas seriam muito mais intrincadas. Além disso, muitos sistemas físicos - tais como os relacionados ao movimento dos corpos ao redor de um ponto central ou com um fenômeno originado de um ponto central - são simples e mais intuitivos para modelar usando coordenadas polares. A motivação inicial para a introdução do sistema polar foi o estudo de movimento circular e orbital.
|
Coordenadas polares são usadas frequentemente em navegação uma vez que o destino ou direção de viagem pode ser dada como um ângulo e distância do objeto sendo considerado. Por exemplo, aeronaves usam uma versão ligeiramente modificada das coordenadas polares para navegação. Nesse sistema, o raio 0º é geralmente chamado de direção 360, e os ângulos continuam no sentido horário, como no sistema matemático. Direção 360 corresponde ao norte magnético, enquanto direções 90, 180 e 270 correspondem ao leste, sul e oeste magnéticos, respectivamente.[20] Portanto, uma aeronave viajando a 5 milhas náuticas para leste estará viajando 5 unidades na direção 90 (pronunciado zero-niner-zero pelo controle de tráfego aéreo).[21]
Modelagem |
Sistemas mostrando simetria radial fornecem configurações naturais para o sistema de coordenadas polares, com um ponto central atuando como polo. Um exemplo desse uso é a equação de fluxo de água subterrânea quando aplicada a poços com simetria radial. Sistemas com uma força radial também são bons candidatos para o uso das coordenadas polares. Esses sistemas incluem campos gravitacionais, que obedecem a lei do quadrado inverso, assim como sistemas com fontes pontuais, tais como antenas de radio.
Sistemas com assimetria radial também podem ser modelados com coordenadas polares. Por exemplo, um microfones com padrão pickup ilustram a resposta proporcional a um som de entrada de uma direção dada, e estes padrões podem ser representados como curvas polares. A curva para um microfone de padrão cardioide, o microfone unidirecional mais comum, pode ser representada como r=1+sin(ϕ)2{displaystyle r={frac {1+sin(phi )}{2}}}
Veja também |
- Sistema de coordenadas cartesiano
- Sistema de coordenadas cilíndricas
- Sistema de coordenadas esféricas
- Coordenadas geográficas
Referências
↑ Brown 1997.
↑ Friendly, Michael (24 de agosto de 2009). «Milestones in the History of Thematic Cartography, Statistical Graphics, and Data Visualization» (PDF)
↑ King 2005, p. 166 em (Koetsier & Luc 2005, p. 162-178).
↑ King 2005, p. 169.
↑ ab Coolidge, Julian (1952). «The Origin of Polar Coordinates». Mathematical Association of America. American Mathematical Monthly. 59 (2): 78–85. JSTOR 2307104. doi:10.2307/2307104
↑ Boyer, C. B. (1949). «Newton as an Originator of Polar Coordinates». Mathematical Association of America. American Mathematical Monthly. 56 (2): 73–78. JSTOR 2306162. doi:10.2307/2306162
↑ Miller, Jeff. «Earliest Known Uses of Some of the Words of Mathematics». Consultado em 10 de setembro de 2006
↑ Smith & 1925 324.
↑ Serway & Jewett Jr. 2005.
↑ «Polar Coordinates and Graphing» (PDF). 13 de abril de 2006. Consultado em 22 de setembro de 2006
↑ Lee, Cohen & Sklar 2005.
↑ Stewart, Tall & Sklar 1983.
↑ Torrence & Torrence 1999.
↑ Claeys, Johan. «Polar coordinates». Consultado em 25 de maio de 2006
↑ Smith 2003.
↑ Husch, Lawrence S. «Areas Bounded by Polar Curves». Consultado em 25 de novembro de 2006
↑ Husch, Lawrence S. «Tangent Lines to Polar Graphs». Consultado em 25 de novembro de 2006
↑ Shankar 1994, p. 81.
↑ Em particular, a taxa de derivação angular aparecendo na expressão da coordenada polar é por conta da partícula sob observação, φ˙{displaystyle {dot {varphi }}}, enquanto que na mecânica Newtoniana clássica é a taxa angular Ω de um quadro de referência.
↑ Santhi, Sumrit. «Aircraft Navigation System». Consultado em 26 de novembro de 2006
↑ «Emergency Procedures» (PDF). Consultado em 15 de janeiro de 2007
↑ Eargle 2005.
Bibliografia |
Adams, Robert; Essex, Christopher (2013). Calculus: a complete course 8 ed. [S.l.]: Pearson Canada Inc. ISBN 978-0-321-78107-9
Anton, Howard; Bivens, Irl; Davis, Stephen (2002). Calculus 7 ed. [S.l.]: Anton Textbooks, Inc. ISBN 0-471-38157-8
Brown, Richard G. (1997). Andrew M. Gleason, ed. Advanced Mathematics: Precalculus with Discrete Mathematics and Data Analysis. Evanston, Illinois: McDougal Littell. ISBN 0-395-77114-5
Eargle, John (2005). Handbook of Recording Engineering 4 ed. [S.l.]: Springer. ISBN 0-387-28470-2
Finney, Ross; Thomas, George; Demana, Franklin; Waits, Bert (1994). Calculus: Graphical, Numerical, Algebraic. [S.l.]: Addison-Wesley Publishing Co. ISBN 0-201-55478-X
King, David A. (2005). The Sacred Geography of Islam. [S.l.: s.n.]
Koetsier, Teun; Luc, Bergmans (2005). Mathematics and the Divine: A Historical Study. Amsterdam: Elsevier. ISBN 0-444-50328-5
Lee, Theodore; Cohen, David; Sklar, David (2005). Precalculus: With Unit-Circle Trigonometry 4 ed. [S.l.]: Thomson Brooks/Cole. ISBN 0-534-40230-5
Serway, Raymond A.; Jewett Jr., John W. (2005). Principles of Physics. [S.l.]: Brooks/Cole—Thomson Learning. ISBN 0-534-49143-X
Shankar, Ramamurti (1994). Principles of Quantum Mechanics 2 ed. [S.l.]: Springer. p. 81. ISBN 0-306-44790-8
Smith, David Eugene (1925). History of Mathematics, Vol II. Boston: Ginn and Co.
Smith, Julius O. (2003). «Euler's Identity». Mathematics of the Discrete Fourier Transform (DFT). [S.l.]: W3K Publishing. ISBN 0-9745607-0-7. Consultado em 22 de setembro de 2006
Stewart, Ian; Tall, David (1983). Complex Analysis (the Hitchhiker's Guide to the Plane). [S.l.]: Cambridge University Press. ISBN 0-521-28763-4
Taylor, John R. (2005). Classical Mechanics. [S.l.]: University Science Books. ISBN 1-891389-22-X
Torrence, Bruce Follett; Torrence, Eve (1999). The Student's Introduction to Mathematica. [S.l.]: Cambridge University Press. ISBN 0-521-59461-8


